Belkin Universal UPS protocol description
Author: Peter Selinger <selinger at users.sourceforge.net>
Updated: 7 January 2004
This document describes the serial port communication protocol used by
the Belkin "Universal UPS" and compatible models.
1. Summary
This document describes the serial port communication protocol used by
the Belkin "Universal UPS". This protocol is known to work with the
F6C800-UNV and F6C120-UNV models, and presumably also works with the
other Universal UPS models, such as the F6C500-UNV, F6C100-UNV, and so
forth. Note that this protocol does not work with the Belkin "Home
Office" series, nor with the "Regulator Pro" series. For some pointers
to information on other Belkin protocols, see 3. Note: Other Belkin Protocols below.
2. General Information
I bought a Belkin "Universal UPS" because, next to APC, Belkin systems
are among the most widely available in stores, at least in Canada. For
instance, they are available from Radio Shack, Target, Office Depot,
etc.
On the surface, Belkin seems Linux-friendly, because they provide a
Linux version of their "Bulldog Plus" UPS management software. This
software is not included on the CD Rom which ships with the UPS, but
one can download it from Belkin's website.
However, unfortunately, the Bulldog Plus software is not as useful as
it might seem. It has many bugs (see Bugs in
Bulldog), and it cannot be configured to allow an unsupervised
recovery (the user must press the front panel button to restart the
UPS after a power failure).
Since the specifications of the protocol were not available, I decided
to do some detective work and to decipher the protocol myself. The
results are described in this document. The information reported here
is necessarily incomplete, but it seems that the most important
aspects of the protocol have been covered.
Unfortunately, there is one serious problem with the "Universal UPS"
firmware: there is no command which causes the UPS to go into "soft
shutdown" mode, which means, to shut off the load until AC power
returns. This makes unsupervised recovery from power failures tricky
and awkward (see 4. Soft Shutdown Workaround
for a suggested solution).
On balance, the Belkin UPS works fine, but the lack of a "soft
shutdown" command is annoying. If you are thinking about buying a UPS,
I think currently APC is a better choice than Belkin at approximately
the same price. Maybe Belkin will come up with an improved version of
their firmware in the future.
3. Note: Other Belkin Protocols
Belkin uses different communication protocols for different UPS
hardware. Belkin's "Bulldog Plus" software apparently knows several of
these protocols, and automatically figures out which one to use based
on the responses it receives from the UPS. I know of the following
protocols. The "NUT Driver" entries below refer to the Network UPS Tools software.
Universal UPS and compatible
Typical message: 0x7e 03 02 01 00 84
Described in: this document
NUT Driver: belkinunv
Product code: F6C800-UNV, F6C120-UNV etc.
Date: 2004
Home Office UPS and compatible
Typical message: None (dumb UPS only?)
NUT Driver: genericups, with upstype=7.
Product code: F6H350-SER, F6H500-SER etc.
Date: 2003
Regulator pro Gold series and compatible
Typical message: ~00P003MNU
Described in:
belkin.txt by Marcus Mueller <marcus at ebootis.de>
(distributed with nut-0.44.1)
http://www.networkupstools.org/library/protocols/belkin.html
http://www.networkupstools.org/library/protocols/belkin-protocol
NUT Driver: belkin
Date: ca. 2000
Older Belkin USVs, compatible with Trust425&625 UPS
Typical message: 0x01
Described in: ups-trust425+625.txt by Peter Bieringer
<pb at bieringer.de> (distributed with nut-0.41.2)
NUT Driver: powercom (?)
Date: ca. 1999
The following information was provided by Dean Gibson about the "Home
Office" models: "From my testing with Belkin's software, the F6C units
and F6H units appear to NOT be software compatible. Belkin's Bulldog
Plus software (Windows or UNIX, either from the included CD or from
the web site) refuses to talk to the F6H units, but the basic Bulldog
software (Windows or UNIX) on the CD that comes with the F6H units
works just fine (although appears to be extremely limited in
capability) with those units."
Only the "Universal UPS" is described in this document.
4. Soft Shutdown Workaround
The main problem with the Belkin Universal UPS is that there appears
to be no software way to put the UPS into "soft shutdown" mode. This
makes unsupervised recovery from power failures tricky. There is a
reliable workaround, as described in this section, but it is
awkward. One must conclude that Belkin's engineers do not understand
the purpose of a UPS very well, at least as it relates to unsupervised
recovery.
To understand the issue, consider what should normally happen to an
unsupervised computer (such as a server) during a power failure:
- The AC power fails, and the UPS goes on battery mode.
- When the battery gets low, the computer enters its normal shutdown
sequence.
- As the very last step of the shutdown process, the computer
signals the UPS to do a "soft shutdown", i.e., to turn its load
off and await AC power. This kills the computer's power supply,
and thus the computer is turned off.
- When the power comes back on, the UPS load comes back on,
restoring the computer's power supply, and thus causing the computer
to reboot. (Note that there is a BIOS setting by which one can
tell the computer to reboot after power loss).
Moreover, if AC power happens to be restored during step 2, the UPS
should still turn its load off briefly in step 3, to allow the
computer to reboot.
The problem with the Belkin UPS is that step 3 is not possible. One
cannot signal the UPS to do a "soft shutdown". One can only signal it
to do a "final shutdown", which means, the UPS stays off even if the
power returns. This leaves the entire system in a state where a human
needs to press the button on the UPS front panel to restart the
system.
There is one way around this problem. Namely, the UPS will enter "soft
shutdown" mode when its batteries run out. Thus, it is possible to
handle a power failure as follows:
- The AC power fails, and the UPS goes on battery mode.
- When the battery gets low, the computer enters its normal shutdown
sequence.
- As the very last step of the shutdown process, we call a special
program which does nothing but to monitor the UPS status.
- If the AC power comes back on before the batteries run out, our
program notices this and causes the computer to reboot.
- If the batteries run out before the AC power comes back on, then
the UPS shuts off its load, thereby killing the computer's power
supply. The UPS is now in "soft shutdown" mode and everything will
reboot when the power comes back on.
The major practical drawback of this solution is that the battery
level is guaranteed to be 0% when the system reboots. Thus, if another
power failure happens before the batteries are recharged, the system
will crash with not enough warning to do an orderly shutdown. We can
solve this problem by adding another special purpose program to the
startup script, before anything is written to the hard disks, which
monitors the UPS and waits for the battery level to reach a minimum
amount before allowing the boot process to resume. This ensures that
the system is in a safe state, should the power fail again.
I have implemented the required functionality as part of the NUT
belkinunv driver. The belkinunv driver can be used as a standalone
program by calling it with the "-x wait" option. When called with this
option, the driver does not fork into the background, but simply
connects to the UPS and waits for AC power to be restored. The
intention is that one puts commands such as the following as the last
part of the computer's shutdown script:
# NEAR END OF SHUTDOWN SCRIPT:
# if shutdown was caused by UPS, perform Belkin UPS workaround.
if [ -f /etc/killpower ] ; then
echo "Waiting for AC power, or for UPS batteries to run out..."
/usr/bin/belkinunv -x wait /dev/ttyS1
# we get here if the power came back on. Reboot.
echo "Power is back. Rebooting..."
reboot
fi
|
In addition, when called with the "-x wait=level" option, the
belkinunv driver waits for the battery charge to reach the specified
level. This can be used in a startup script as follows. Put this
before any disks are mounted read/write, and before any file system
integrity checks, so that the system is in a safe state.
# NEAR BEGINNING OF STARTUP SCRIPT:
# if we are recovering from a power failure, wait for the UPS to
# charge to a comfortable level before writing anything to disk
if [ -f /etc/killpower ] ; then
echo "Waiting for UPS battery charge to reach 60%..."
/usr/bin/belkinunv -x wait=60 -x nohang /dev/ttyS1
fi
|
Here, the "-x nohang" option ensures that the computer will boot
properly in case the UPS is no longer attached. There might be many
reasons to remove the UPS during a power failure, for instance, you
take your computer to a friend's house, or you attach it to a
generator, or whatever. Giving the "-x nohang" option ensures that
your computer is always bootable.
For a detailed description of the "-x wait" and related options,
please see the belkinunv(8) man page.
5. Description of the Protocol
5.1. Opening the serial communication link
The serial port parameters are: 2400 baud, 8 bits, 1 stop bit, no
parity. More precisely, the following parameters are used: B2400 | CS8
| CREAD | HUPCL | CLOCAL.
In order to get the UPS to switch to "smart" mode, one first needs to
set RTS and drop DTR for at least 0.25 seconds. (RTS and DTR refer to
two specific pins in the 9-pin serial connector). This signals the UPS
to switch to serial mode. Without this step, there will be no serial
communication possible. In experimenting with my own UPS, I found that
0.25 seconds is the minimum time required for the UPS to react;
however, the time required may differ for different UPS hardware. The
Bulldog software waits 1 second, so this is probably a safe bet.
After this, flush any unread garbage bytes from the serial port.
Thereafter, simply communicate with the port via usual "read" and
"write" operations.
The following C procedure shows exactly how the serial port should be
opened and prepared:
#include <fcntl.h>
#include <sys/ioctl.h>
#include <string.h>
#include <errno.h>
#include <termios.h>
#include <unistd.h>
/* Open and prepare a serial port for communication with a Belkin
Universal UPS. DEVICE is the name of the serial port. It will be
opened in blocking read/write mode, and the appropriate
communications parameters will be set. The device will also be
sent a special signal (clear DTR, set RTS) to cause the UPS to
switch from "dumb" to "smart" mode, and any pending data (=garbage)
will be discarded. After this call, the device is ready for reading
and writing via read(2) and write(2). Return a valid file
descriptor on success, or else -1 with errno set. */
int belkin_open_tty(char *device) {
int fd;
struct termios tios;
struct flock flock;
char buf[128];
const int tiocm_dtr = TIOCM_DTR;
const int tiocm_rts = TIOCM_RTS;
int r;
/* open the device */
fd = open(device, O_RDWR | O_NONBLOCK);
if (fd == -1) {
return -1;
}
/* set communications parameters: 2400 baud, 8 bits, 1 stop bit, no
parity, enable reading, hang up when done, ignore modem control
lines. */
memset(&tios, 0, sizeof(tios));
tios.c_cflag = B2400 | CS8 | CREAD | HUPCL | CLOCAL;
tios.c_cc[VMIN] = 1;
tios.c_cc[VTIME] = 0;
r = tcsetattr(fd, TCSANOW, &tios);
if (r == -1) {
close(fd);
return -1;
}
/* signal the UPS to enter "smart" mode. This is done by setting RTS
and dropping DTR for at least 0.25 seconds. RTS and DTR refer to
two specific pins in the 9-pin serial connector. Note: this must
be done for at least 0.25 seconds for the UPS to react. */
r = ioctl(fd, TIOCMBIC, &tiocm_dtr);
if (r == -1) {
close(fd);
return -1;
}
r = ioctl(fd, TIOCMBIS, &tiocm_rts);
if (r == -1) {
close(fd);
return -1;
}
/* flush both directions of serial port: throw away all data in
transit */
r = tcflush(fd, TCIOFLUSH);
if (r == -1) {
close(fd);
return -1;
}
/* lock the port */
memset(&flock, 0, sizeof(flock));
flock.l_type = F_RDLCK;
r = fcntl(fd, F_SETLK, &flock);
if (r == -1) {
close(fd);
return -1;
}
/* sleep at least 0.25 seconds for the UPS to wake up. Belkin's own
software sleeps 1 second, so that's what we do, too. */
usleep(1000000);
/* flush incoming data again, and read any remaining garbage
bytes. There should not be any. */
r = tcflush(fd, TCIFLUSH);
if (r == -1) {
close(fd);
return -1;
}
r = read(fd, buf, 127);
if (r == -1 && errno != EAGAIN) {
close(fd);
return -1;
}
/* finally, switch to blocking i/o, so that future read/write calls
will read or write at least one byte */
r = fcntl(fd, F_SETFL, 0); /* clear O_NONBLOCK */
if (r == -1 && errno != EAGAIN) {
close(fd);
return -1;
}
return fd;
}
|
5.2. Structure of messages
The same basic format is used for messages from the computer to the
UPS ("commands") and from the UPS to the computers ("responses").
Communication takes place as a sequence of command/response
pairs. Communication is always initiated by the computer, and the UPS
reacts to each command by sending a single, matching, response.
The format of all messages is:
| Header |
Type |
Length |
Register ID |
Data |
Checksum |
| 1 byte |
1 byte |
1 byte |
1 byte |
variable |
1 byte |
The message fields are explained as follows:
| Header: |
The literal byte 0x7e, or ASCII '~'
|
| Type: |
There are five possible message types:
- 3: read command (computer to UPS): polls the value of a register
- 5: read response (UPS to computer): returns data from read command
- 4: write command (computer to UPS): write the value of a register
- 2: write response (UPS to computer): write was successful
- 1: error response (UPS to computer): sent in response to a bad command
|
| Length: |
The number of bytes in the Data field, plus 1.
Equivalently, the length of the entire message, minus 4.
|
| Register ID: |
The number of the register to be read or written.
|
| Data: |
The argument of the message. The precise meaning depends on the type
of message.
- read command (type=3): the argument is the single byte 00.
- read response (type=5): the argument depends on the type of data
stored in the register in question (see 5.4. Individual UPS registers below):
- For a 1-byte register, it is a single byte.
- For a 2-byte register, it is a little-endian 2-byte integer
(i.e., with the lower order byte sent first).
- For a string register, the data is the string itself (not
null-terminated).
- write command (type=4): the argument is always encoded as a
2-byte, little-endian integer, regardless of whether the
corresponding register holds a 1-byte or 2-byte value. In case
of a 1-byte register, the higher-order byte of the argument
(i.e., the second byte) is set to 0. Write commands do not occur
for string registers, since such registers are read-only.
- write response (type=2): the argument is the same as that
of the write command which is being responded to.
- error response (type=1): the argument is the same as
that of the command which caused the error.
|
| Checksum: |
The checksum for this message. It equals the sum of all previous bytes
of the message (including the initial 7e), modulo 0x100.
|
Format of responses:
Each command (computer to UPS) is followed by a single response (UPS
to computer). A read command (type=3) is normally followed by a read
response (type=5), or sometimes by an error response (type=1). A write
command (type=4) is normally followed by a write response (type=2), or
sometimes by an error response (type=1).
The Register ID field of the response is identical to the Register ID
field of the command being responded to. Moreover, the Data field of
the response is identical to the Data field of the command being
responded to, in case of an error response or a write response. In
case of a read response, the Data field is of course the value being
read.
An error response is only sent if the corresponding command was
well-formed (including a correct checksum), but cannot be obeyed for
some reason (e.g., the corresponding register is not implemented).
Ill-formed commands are silently ignored.
5.3. Examples
| Reading a 1-byte register: |
| |
Command: |
7e 03 02 01 00 84 |
read register 01, voltage rating |
| Response: |
7e 05 02 01 78 fe |
register 01 is 0x78 = 120 = 120V |
| Reading a 2-byte register: |
| |
Command: |
7e 03 02 20 00 a3 |
read register 20, battery voltage |
| Response: |
7e 05 03 20 0e 01 b5 |
register 20 is 0x010e = 269 = 26.9V |
| Reading a string register: |
| |
Command: |
7e 03 02 0d 00 90 |
read register 0d, UPS model |
| Response: |
7e 05 0e 0d 46 36 43 38 30
30 2d 55 4e 56 20 20 20 7b
|
register 0d is "F6C800-UNV " |
| Reading a non-existent register: |
| |
Command: |
7e 03 02 1a 00 9d |
read register 1a, temperature |
| Response: |
7e 01 02 1a 00 9b |
error: cannot read register 1a |
| Writing to a register: |
| |
Command: |
7e 04 03 0c 02 00 93 |
write 0x02 to register 0c, voltage sensitivity |
| Response: |
7e 02 03 0c 02 00 91 |
written successfully |
| Writing to a non-existent register: |
| |
Command: |
7e 04 03 00 00 00 85 |
write 0x00 to register 00 |
| Response: |
7e 01 03 00 00 00 82 |
error: cannot write to register 00 |
5.4. Individual UPS registers
The UPS has a number of internal registers, which can be read and/or
written. Some registers are read-only. There either hold hard-coded
values (such as the UPS model name or nominal voltage rating), or they
describe the state of the UPS, such as the current battery voltage or
whether certain events have occured. Some other registers can be read
and written. These registers control or configure aspects of the UPS's
behavior, such as its voltage sensitivity, or whether the audible
alarm is enabled. In some cases, setting the value of a writable
register triggers an event, such as a battery self-test or a UPS
shutdown.
Each register is identified by a unique number, the register ID. We
always write register ID's as hexadecimal values.
Registers can hold different types of data. Some registers hold a
1-byte integer, others hold a 2-byte integer, and others hold a
variable length string.
Some registers are read only once (during startup) by the Bulldog
software, and thereafter ignored. These registers are marked "startup"
in the list below. All other registers are read periodically.
We now describe the individual registers:
| Reg.ID |
Name |
Data |
Flags |
Typical
Value |
Description |
| 00: |
unknown / does not exist |
n/a |
n/a |
n/a |
This register does not really exist. It is written by the linux driver
when the user requests to set the voltage sensitivity. However,
this is a bug and the UPS responds with an error message. The Windows
driver correctly writes register 0c instead.
|
| 01: |
voltage rating |
1 byte |
RO HC ST |
120 |
The nominal voltage in V. In North America, this is 120.
|
| 02: |
frequency rating |
1 byte |
RO HC |
60 |
The nominal AC frequency in Hz. In North America, this is 60.
|
| 03: |
power rating |
2 bytes |
RO HC ST |
800 |
The nominal power rating in VA. For a 800VA UPS, this is 800.
|
| 04: |
battery voltage rating |
1 byte |
RO HC ST |
24 |
The nomial battery voltage in V. For my system, this is 24.
|
| 05: |
unknown |
1 byte |
RO ST |
100 |
I don't know the function of this register. On my system, it takes
value 0x64 = 100.
|
| 06: |
low transfer voltage |
2 bytes |
RW |
90 |
I am not entirely sure about the meaning of registers 06-0b, but I
think that they are voltage transfer points. 06 and 09 are
read/write, the others are read-only.
The only way to test whether these "transfer points" actually work
would be to vary the UPS input voltage and observe what happens.
I don't have equipment to do this. Ditto for register 0c, voltage
sensitivity.
Update 2004/06/14: Thomas Bliesener in Mexico has confirmed that
registers 06 and 09 are indeed voltage transfer points. He writes:
"It's easy to verify: connect the ups to a mexican power supply
system. I wondered why my server was off every morning with the
new Belkin UPS and then I discovered that the voltage rose at
night from nominal 127 V to 136 V. With the buggy bulldog software
I couldn't change the high voltage transfer, with your console.c
it was simple."
|
| 07: |
low transfer voltage upper bound |
2 bytes |
RO HC ST |
95
|
| 08: |
low transfer voltage lower bound |
2 bytes |
RO HC ST |
85
|
| 09: |
high transfer voltage |
2 bytes |
RW |
136
|
| 0a: |
high transfer voltage upper bound |
2 bytes |
RO HC ST |
141
|
| 0b: |
high transfer voltage lower bound |
2 bytes |
RO HC ST |
131 |
| 0c: |
voltage sensitivity |
1 byte |
RW |
0 |
The voltage sensitivity can be read and written. Admissible values
are 0=normal, 1=medium, 2=low. Presumably this influences how
tolerant the UPS is to deviations from the "nominal" voltage;
however, I have not found this point elaborated in Belkin's
documentation. I am not sure how this interacts with registers
06-0b.
|
| 0d: |
UPS model |
string |
RO HC ST |
|
The UPS model name as a sequence of ASCII characters, not
null-terminated. For my system, registers 0d and 0e are identical,
and both contain the string
"F6C800-UNV " (with three space
characters at the end of the string).
|
| 0e: |
UPS model |
string |
RO HC ST |
|
| 0f: |
firmware/ups type |
1 byte |
RO HC ST |
0x41 |
The higher 4 bits determine the firmware version.
The lower 4 bits determine the UPS type: 0=online, 1=offline,
2=line-interactive. In the Belkin Monitor, this is used to
determine the type of "wiring diagram" displayed (and does not
affect anything else, as far as I can tell).
Online:
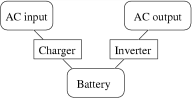
Offline:
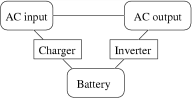
Line-interactive:
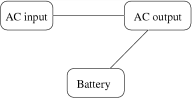
Example: a value of 0x41 means firmware version = 4, UPS type =
offline.
|
| 10: |
battery test status |
1 byte |
RW |
0 |
When read, this register takes the following values:
- 0 = no test performed
- 1 = test passed (this is also sometimes used for canceled tests)
- 2 = test failed
- 3 = test failed
- 4 = test aborted
- 5 = test in progress
When written, this register triggers the following events:
- 1 = initiate 10-second battery test
- 2 = initiate deep battery test
- 3 = cancel test
|
| 11: |
audible alarm status |
1 byte |
RW |
2 |
A flag which determines whether the audible alarm of the UPS
system is enabled.
- 2 = audible alarm enabled
- 3 = audible alarm disabled
My UPS allows this value to be set to any value in the range
0-255. For val<=2, the alarm is enabled, for val>=3, it is
disabled.
Note: the alarm can only be disabled when it is already ringing.
In other words, the alarm is enabled each time an alarm-worthy
event occurs, but can then be disabled during the event. Also
note: during a critical event (e.g., low battery), the alarm
rings faster and cannot be disabled.
|
| 12: |
unknown |
1 byte |
RW |
0 |
I don't know the function of registers 12-14. On my system, they
all take value 0. Setting these registers has no apparent effect;
subsequents reads will still return 0.
|
| 13: |
unknown |
1 byte |
RW |
0 |
| 14: |
unknown |
1 byte |
RW |
0 |
| 15: |
shutdown timer |
2 bytes |
RW |
0 |
This register holds the time, in seconds, until the UPS shuts
down its load, or 0 if no shutdown is scheduled. It can be read and
written.
Note: a scheduled shutdown cannot be stopped. Setting a running
shutdown timer to 0 causes it to continue to count down from
0xffff = 65535. This is idiotic in my opinion, but it is what
my Belkin UPS does.
Note: when this counter reaches 0, the UPS either performs a
"final shutdown" or a "timed shutdown", never a "soft shutdown" as
far as I can tell (see 4. Soft Shutdown
Workaround above for more information). Which kind of shutdown
is performed depends on the state of the restart timer, see
register 16 below.
Warning: the Bulldog software panics and wants to shut down the
operting system immediately if it sees that register 15 is
non-zero.
|
| 16: |
restart timer |
2 bytes |
RW, ST |
0 |
This register holds the time, in minutes (not seconds!), until the
UPS will restart its load, or 0 if the timer is not set.
Once this timer is set, it will be decremented once a minute;
however, one cannot predict when the first decrement will happen
(it happens between 0 and 60 seconds after the counter was set).
There is no way to stop a running timer: setting it to 0 will
cause it to loop back to 0xfff = 65535.
When the shutdown timer (register 15) reaches 0, then the value of
the restart timer (register 16) at that particular time
determines what kind of shutdown the UPS performs. If the restart
timer is 0, a "final shutdown" will be performed, otherwise a
"timed shutdown".
After a "final shutdown", flag 0x0020 in register 22 will be set,
and the UPS will remain off permanently until the front panel
button is pressed. It do not currently know a way of re-starting
it through the serial port. Also, the system remains off
irrespectively of what happens to the AC power. In the "final
shutdown" state, all timers (register 15 and 16) are stopped and
no longer work; thus there is no way of ending a final shutdown in
software. If AC power is lost during a final shutdown, the UPS
loses communication on its serial port.
During a "timed shutdown", flag 0x0020 in register 22 will not be
set. Register 23 will be 0x10 if AC power is on, or else 0x00. The
system load will be turned back on as soon as the restart timer
reaches 0. If any non-zero value is written to the restart timer
during a timed shutdown, the system load will be immediately
turned on (and the restart timer is reset to 0).
Note: to initiate a timed shutdown, write 2 to register 16, then
write 1 to register 15. The reason we write "2" and not "1" to
register 16 is that there is no guarantee it is not decremented
between the two writes.
|
| 17: |
unknown |
1 byte |
RW |
0 |
I don't know the function of this register. On my system, it takes
value 0. I found that if this register is non-zero, then the
Bulldog software initiates an immediate shutdown. But it does not
specify the reason. Setting this register has no apparent
effect; subsequents reads will still return 0.
|
| 18: |
AC input voltage |
2 bytes |
RO |
1176 |
The current AC input voltage in 0.1V, or 0 on loss of utility
power. Note that this value is non-zero as long as AC power is
present, even during a battery test. Example: 1176 = 117.6V
|
| 19: |
AC input frequency |
2 bytes |
RO |
599 |
The current AC input frequency in 0.1Hz, or 0 on loss of utility
power. Note that this value is non-zero as long as AC power is
present, even during a battery test. Example: 599 = 59.9Hz.
|
| 1a: |
temperature |
1 byte |
RO |
23 |
The current UPS temperature, in degrees C. My UPS does not
actually implement this register, but the Bulldog software
recognizes it.
|
| 1b: |
AC output voltage |
2 bytes |
RO |
1168 |
The current AC output voltage in 0.1V, both during on-line and
battery operation. Example: 1168 = 116.8V.
|
| 1c: |
AC output frequency |
2 bytes |
RO |
598 |
The current AC output frequency in 0.1Hz, both during on-line and
battery operation. Example: 598 = 59.8Hz.
|
| 1d: |
unknown |
1 byte |
RO |
250 |
I don't know the function of this register. On my system, it takes
value 250.
|
| 1e: |
loading level |
1 byte |
RO |
35 |
The current loading level in percent.
|
| 1f: |
battery status |
1 byte |
RO ST |
0x10 |
Apparently identical to register 23.
|
| 20: |
battery voltage |
2 bytes |
RO |
248 |
The current battery voltage in 0.1V. Example: 248 = 24.8V.
|
| 21: |
battery level |
1 byte |
RO |
86 |
The current battery level in percent.
|
| 22: |
UPS status |
2 bytes |
RO |
0x8000 |
This register holds the following flags. Since some of these
conditions rarely occur, I am not sure whether my UPS implements
all of them; anyway, the Bulldog Monitor recognizes them.
- 0x0001: AC Failure
- 0x0004: ? - this is used, but I am not sure what it means.
- 0x0008: ?
- 0x0010: Overload
- 0x0020: UPS System Off (i.e., load is off)
- 0x0040: Overheat
- 0x0080: UPS Fault
- 0x2000: Awaiting Power
- 0x8000: Buzzer status (see below)
Note that the AC Failure flag is set whenever the input AC power
fails. This flag is not set during battery self-tests (unless the
power fails at the same time). The Bulldog driver uses the AC
Failure flag as the sole means to determine whether to initiate
shutdown procedures, and also as the sole means to determine the
drawing of the "Diagram" display, as well as the AC Source status
line in the "Main" display.
The Buzzer status flag is somewhat strange. On my UPS, it seems to
be set precisely if (1) the UPS is operating on Battery power and
the alarm is physically ringing, including during a test, or (2)
the UPS is operating on AC power. The Bulldog software uses this
flag as the basis for the "Buzzer Alarm" status flag (in the
"Status" display), with the annoying effect that this flag is
almost always on, even when the buzzer is not ringing. Maybe this
is a bug in my UPS's firmware. In any case, it seems that the
buzzer is actually ringing if and only if flag 0x8000 in register
22 and flag 0x20 in register 23 are both set.
Also note that my UPS sets 0x0005 on AC Failure; however, the
0x0004 bit is apparently ignored by the Bulldog software.
Finally, if the 0x0008 flag is set during an AC Failure, then the
"UPS Health" status line in the "Main" display will turn orange.
If 0x0008 is not set, this is not necessarily the case (unless,
strangely, register 1f was 0x00 or 0x20 during startup). It is not
clear to what extent this behavior means anything, and to what
extent it just reveals idiosyncracies in the Bulldog software.
|
| 23: |
battery status |
1 byte |
RO |
0x10 |
This register holds the following flags.
- 0x04: battery low
- 0x10: battery charging
- 0x20: operating on battery power (including during tests)
- 0x40: battery depleted
- 0x80: battery needs to be replaced
Note that the Bulldog software ignores flags 0x10 and 0x20, and
relies solely on flag 0x0001 of register 22 to determine the
current operating mode. This is strictly speaking wrong. Note
that after switching from battery powered mode to AC powered mode,
it takes a few seconds until the battery starts being charged,
i.e., the UPS status / AC Failure flag will go off a while before
the battery status flag goes from 0x20 to 0x10. A battery status
flag of 0x00 has also been observed, for instance, when turning
off the load during a test (so that the battery is neither
charging nor discharging).
Notes: here is what happens if AC power gets disconnected and we
continue the load. First, the UPS will switch to battery power
(and the buzzer will beep every 10 seconds unless disabled). The
UPS status becomes 0x8005 (or 0x0005 if the buzzer is
disabled). The battery status becomes 0x20. The battery voltage
and battery level will decrease continually. When the battery
level falls below 15, the "battery low" flag will come on, thus
the battery status become 0x24. At the same time the buzzer will
start ringing fast and can no longer be disabled. The UPS status
is unchanged at 0x8005. The battery voltage and level will
continue to drop, and the UPS will continue to supply power, even
when the battery level reaches 0. Finally, after the battery level
has been 0 for a while, the UPS turns its load off and does a
"soft shutdown". At this point, the battery status becomes 0x40
(battery depleted) and the UPS status becomes 0xa001 (AC failure
and awaiting power). If one now turns the AC power back on, the
UPS will power up and enter UPS status 0x8000 and battery status
0x10.
This is the only scenario in which I have observed a "soft
shutdown", as indicated by UPS status flag 0x2000. I still don't
know how to bring about a soft shutdown manually. Therefore, the
workaround under 4. Soft Shutdown
Workaround above is necessary.
Note that, based just on registers 22 and 23, it is not in general
possible to determine whether the UPS is "online", i.e., whether
the load is currently powered by AC power. Indeed, if the load has
been turned off manually (e.g. due to a timed shutdown), the UPS
status may well be 0x8000, and the battery status may be 0x10,
just as during normal operation. We therefore use the following
method for determining whether the system is "online", "on
battery", or "off load": if battery status flag 0x20 is set, the
system of "on battery", else if the output voltage is non-zero,
the system is "online", else the system is "off load".
|
| 24: |
unknown |
1 byte |
RW |
0 |
I don't know the function of registers 24-27. On my system, they
all take value 0. Setting these registers has no apparent effect;
subsequents reads will still return 0. The Bulldog driver does not
attempt to read these registers.
|
| 25: |
unknown |
1 byte |
RW |
0 |
| 26: |
unknown |
1 byte |
RW |
0 |
| 27: |
unknown |
1 byte |
RW |
0 |
| 3f: |
time remaining |
1 byte |
RO |
0 |
The estimated backup time until the battery runs out, in
minutes. My UPS does not actually implement this register, but the
Bulldog software recognizes it.
|
6. Open Questions
- There should be a way of initiating a soft shutdown without
waiting for the batteries to run out.
- Some information is still missing. There must be some flags which I
have not observed during my tests, in particular, there should be
flags for: Bypass Active, Fan Failure, Fuse Break, Inverter Bad,
Charger Bad, Bypass Bad.
- I am not sure how registers 06-0b interact with register 0c.
7. Firmware Problems
Here are some areas in which the Belkin Universal UPS firmware could
be improved:
- add a command to shut down the load and put UPS into "awaiting
power" mode. This should "flash" the load briefly (shut the load off
and back on) in case AC power is already present.
- allow shutdown timer and restart timer to be reset to 0 to cancel
a pending shutdown, rather than starting to count from 65535.
- allow timers to be set more accurately. Currently, by setting the
restart timer to 1, it might expire anywhere between immediately and
60 seconds. In particular, it is not possible to set both the shutdown
timer and the restart timer to 1 at the same time, because there is no
guarantee that the first timer won't expire before the second one is
set. Thus, it is not possible to do a reliable timed shutdown of less
than 2 minutes.
- Calculate battery level more accurately. Currently, this is a
simple function of battery voltage, which means that the levels are
interpreted very differently in battery mode than in line
mode. This could be compensated for in software, but not reliably, as
the battery levels might differ from one hardware/firmware version to
the next.
8. Disclaimer
This document is distributed in the hope that it will be useful, but
without any warranty. It is provided "as is", without warranty of any
kind, either expressed or implied, including, but not limited to, the
implied warranties of merchantability and fitness for a particular
purpose. The entire risk as to the usage of information contained in
this document is with you. Should the information prove incorrect, it
may damage your UPS, your computer, or other equipment. You assume the
cost of all necessary servicing, repair or correction.
In no event unless required by applicable law or agreed to in writing
will any of the authors of this document, or any other party who may
modify and/or redistribute this document, be liable to you for
damages, including any general, special, incidental or consequential
damages arising out of the use or inability to use the information
(including but not limited to loss of data or data being rendered
inaccurate or losses sustained by you or third parties), even if such
author or other party has been advised of the possibility of such
damages.